Tag: construction-planning
-
 Automated sequence and motion planning for robotic spatial extrusion of 3D trussesYijiang Huang, Caelan R. Garrett and Caitlin T. Mueller, Preprint, arXiv:1810.00998, 2018
Automated sequence and motion planning for robotic spatial extrusion of 3D trussesYijiang Huang, Caelan R. Garrett and Caitlin T. Mueller, Preprint, arXiv:1810.00998, 2018While robotics for architectural-scale construction has made significant progress in recent years, a major challenge remains in automatically planning robotic motion for the assembly of complex structures. This paper proposes a new hierarchical planning framework to solve the assembly planning problem for architectural discrete structures, which usually have a long planning horizon and 3D configuration complexity. By decoupling sequence and motion planning, the planning framework is able to efficiently solve the assembly sequence, end-effector poses, joint configurations, and transition trajectories for assembly of spatial structures with nonstandard topologies, which hasn't been demonstrated in previous literature. Together with the algorithmic results, this paper also presents an open-source and modularized software implementation called Choreo that is machine and application-agnostic. To demonstrate the power of this algorithmic framework, three case studies, including real fabrication and simulation results, are presented to show Choreo's application on spatial extrusion.
-
 3D truss topology optimization for automated robotic spatial extrusionYijiang Huang, Josephine V. Carstensen, Caitlin T. Mueller, International Association for Shell and Spatial Structures (IASS), 2018
3D truss topology optimization for automated robotic spatial extrusionYijiang Huang, Josephine V. Carstensen, Caitlin T. Mueller, International Association for Shell and Spatial Structures (IASS), 2018This paper contributes new knowledge and results to the fields of topology optimization and robotic spatial extrusion through the consideration of how these methods can be used together. Specifically, a new topology optimization formulation is presented that accounts for the manufacturing constraints of uniform cross section and average member length. In addition, a new robotic assembly planning framework is demonstrated, which allows the complex but structurally efficient results of the topology optimization to be materialized in a reasonable amount of time. Three novel case studies produced by the proposed topology optimization framework are presented to demonstrate how automated assembly planning and robotic extrusion can enable a direct and efficient means to materialize a 3D topology-optimized truss.
-
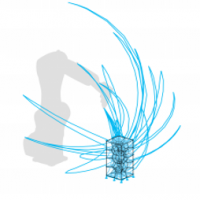
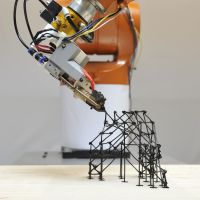
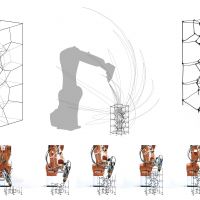 Robotic extrusion of architectural structures with nonstandard topologyYijiang Huang, Josephine Carstensen, Lavender Tessmer and Caitlin Mueller, ROB|ARCH 2018: Robotic Fabrication In Architecture, Art and Design 2018, 2018 (Under review)
Robotic extrusion of architectural structures with nonstandard topologyYijiang Huang, Josephine Carstensen, Lavender Tessmer and Caitlin Mueller, ROB|ARCH 2018: Robotic Fabrication In Architecture, Art and Design 2018, 2018 (Under review)This paper presents a fast and flexible method for robotic extrusion (or spatial 3D printing) of designs made of linear elements that are connected in non-standard, irregular, and complex topologies. Nonstandard topology has considerable potential in design, both for visual effect and material efficiency, but usually presents serious challenges for robotic assembly since repeating motions cannot be used. Powered by a new automatic motion planning framework called Choreo, this paper’s robotic extrusion process avoids human intervention for steps that are typically arduous and tedious in architectural robotics projects. Specifically, the assembly sequence, end effector pose, joint configuration, and transition trajectory are all generated automatically using state-of-the-art, open-source planning algorithms developed in the broader robotics community. Three case studies with topologies produced by structural optimization and generative design techniques are presented to demonstrate the potential of this approach.
-
 Yijiang Huang presents at ITA, ETH Zurich2018-03-26, Tags: fabrication construction-planning
Yijiang Huang presents at ITA, ETH Zurich2018-03-26, Tags: fabrication construction-planningYijiang Huang is presenting his work on "Robotic assembly planning: towards construction-driven geometry guidance" at the Institute of Technology in Architecture (ITA), ETH Zurich on March 26, 2018. This talk is a part of the MAS Digital Fabrication Lecture Series.
-
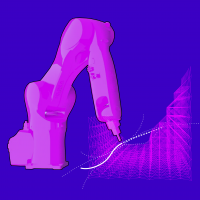 Automatic Path Planning Framework for Robotic ConstructionResearch, 2016 - Present
Automatic Path Planning Framework for Robotic ConstructionResearch, 2016 - PresentIn the design process for robotic construction, architects have increasingly powerful tools to help simulate and visualize robotic motion within a parametric design environment. However, these tools still require that designers manually “plan” for the robot, generating guiding curves for robot to follow that avoid collisions with objects in work environment. This significantly slows down the digital fabrication workflow and sometimes prohibits the materialization of design due to the intricate planning process.
This project introduces a new workflow that overcomes these limitations through an automated robotic path planning software layer linking design geometry to robotic toolpath code. The proposed framework takes input design from designers and automatically plan for robotic trajectories to carry out the task. The planning algorithm integrates planning constraints to ensure that collisions, robotic axis singularities, and other disruptions do not occur.