Tag: fused-deposition-modelling
-
 Characterization of anisotropy in fused deposition modeling 3D printingResearch, 2015 - Present
Characterization of anisotropy in fused deposition modeling 3D printingResearch, 2015 - PresentThe layer-based technique of the fused deposition modeling (FDM) additive manufacturing process creates anisotropy within printed parts, but the full quantitative characterization of this anisotropy is not yet available, making it difficult to predict structural performance of printed parts. This research studies the tensile strength of ABS plastic created by FDM in incrementally rotated orientations, to analytically and experimentally characterize the anisotropy of the material. The known relationship between strength and orientation can then be used to create a predictive model of the local material behavior in any FDM printed object.
-
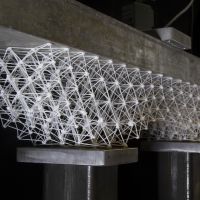 Structural lattice additive manufacturingResearch, 2015 - Present
Structural lattice additive manufacturingResearch, 2015 - PresentThe structural performance of traditional 3D-printed parts is typically limited by nature of the ayer-by-layer construction. Such parts are anisotropic due to decreased adhesion between layers and the internal structure is uniform, not flexible. This project seeks to overcome these limitations by printing along the edges of a stress-optimized lattice. With this approach, larger-scale, lightweight parts can be printed with an optimal structure that can vary depending on a loading configuration. The results of this project may be promising for diverse fields including concrete rebar design, spaceframe prototyping for buildings, and generative art.
The fabrication component of the project includes designing a custom extruder for a six-axis robotic arm that excels in printing along hard-to-reach toolpaths in free air, with larger nozzle diameters. To complement this technology, a computational tool is in development to generate lattices and toolpaths for any part and its loading configuration.
-
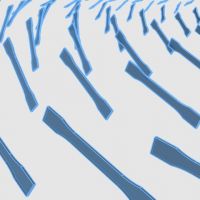
 Stress line additive manufacturing (SLAM)Research, 2014 - 2015
Stress line additive manufacturing (SLAM)Research, 2014 - 2015The project presents a new integrated software and hardware process that reconsiders the traditional addive manufacturing (AM) technique of fused deposition modelling (FDM) by adding material explicitly along the three-dimensional principal stress trajectories, or stress lines, of 2.5-D structural surfaces. Using a six-axis robotic arm, this project materializes continuous stress fields into discrete structural topologies, rendered computationally as robotic tool paths. The goal of this project is to develop and perfect this new technique, and to explore conditions in which it is favorable to conventional layer-based additive manufacturing. The research is supported by methodologies including computational structural analysis and comparative structural load testing. For more video information, see this YouTube video.
-
 Robotics-enabled stress line additive manufacturingKam-Ming Mark Tam, Caitlin Mueller, James Coleman, and Nicholas Fine, Rob|Arch 2016: Robotic Fabrication in Architecture, Art and Design 2016, 2016
Robotics-enabled stress line additive manufacturingKam-Ming Mark Tam, Caitlin Mueller, James Coleman, and Nicholas Fine, Rob|Arch 2016: Robotic Fabrication in Architecture, Art and Design 2016, 2016The presented research uses a 6-axis industrial robot arm and a custom-designed heated extruder to develop a new robotic additive manufacturing (AM) framework for 2.5-D surface designs that adds material explicitly along principal stress trajectories. AM technologies, such as fused deposition modelling (FDM), are typically based on processes that lead to anisotropic products with strength behaviour that varies according to filament orientation; this limits its application in both design prototypes and end-use parts and products. Since stress lines are curves that indicate the optimal paths of material continuity for a given design boundary, the proposed stress-line based oriented material deposition opens new possibilities for structurally-performative and geometrically-complex AM, which is supported here by fabrication and structural load testing results. Called stress line additive manufacturing (SLAM), the proposed method achieves an integrated workflow that synthesizes parametric design, structural optimization, robotic computation, and fabrication.